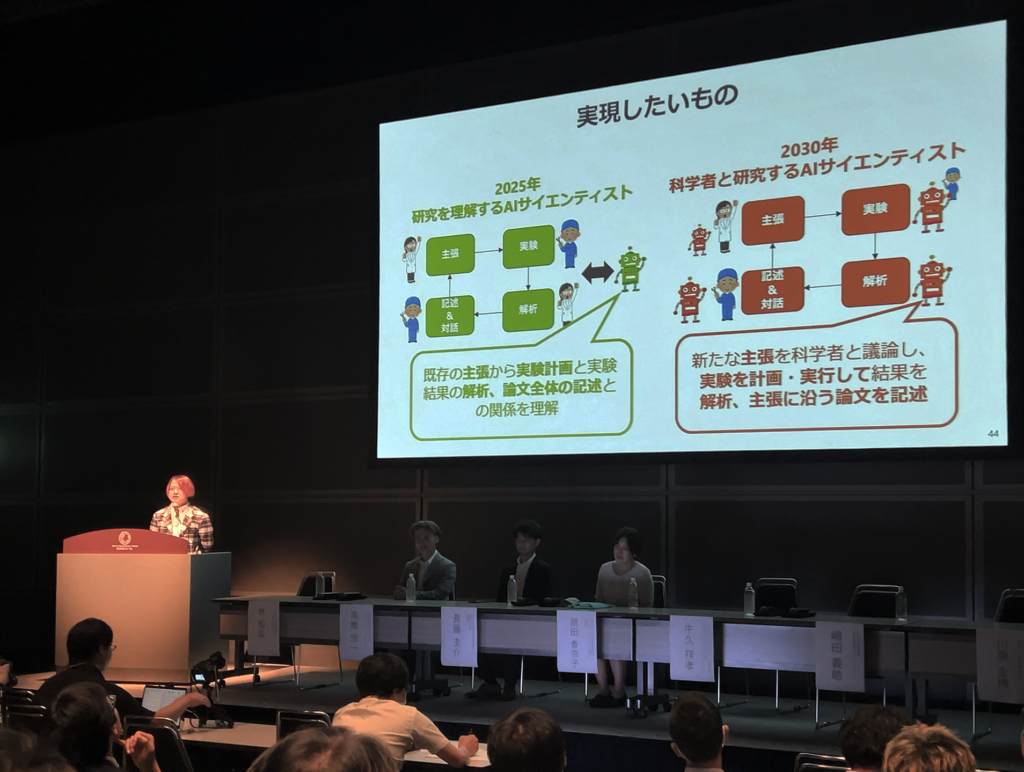
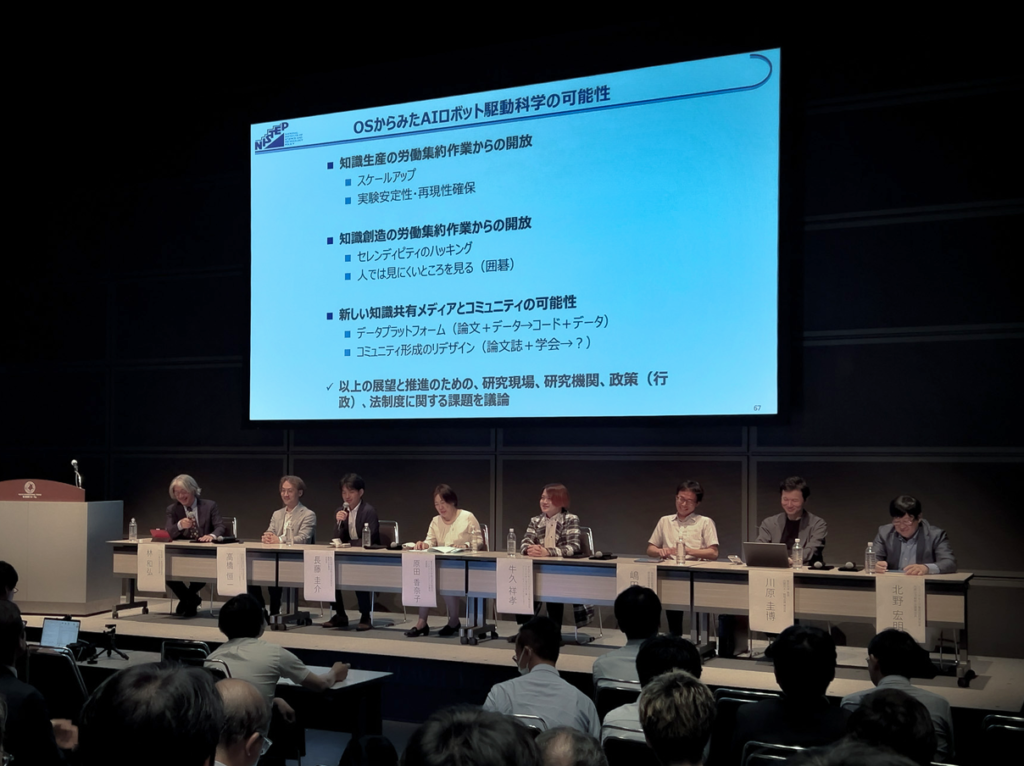
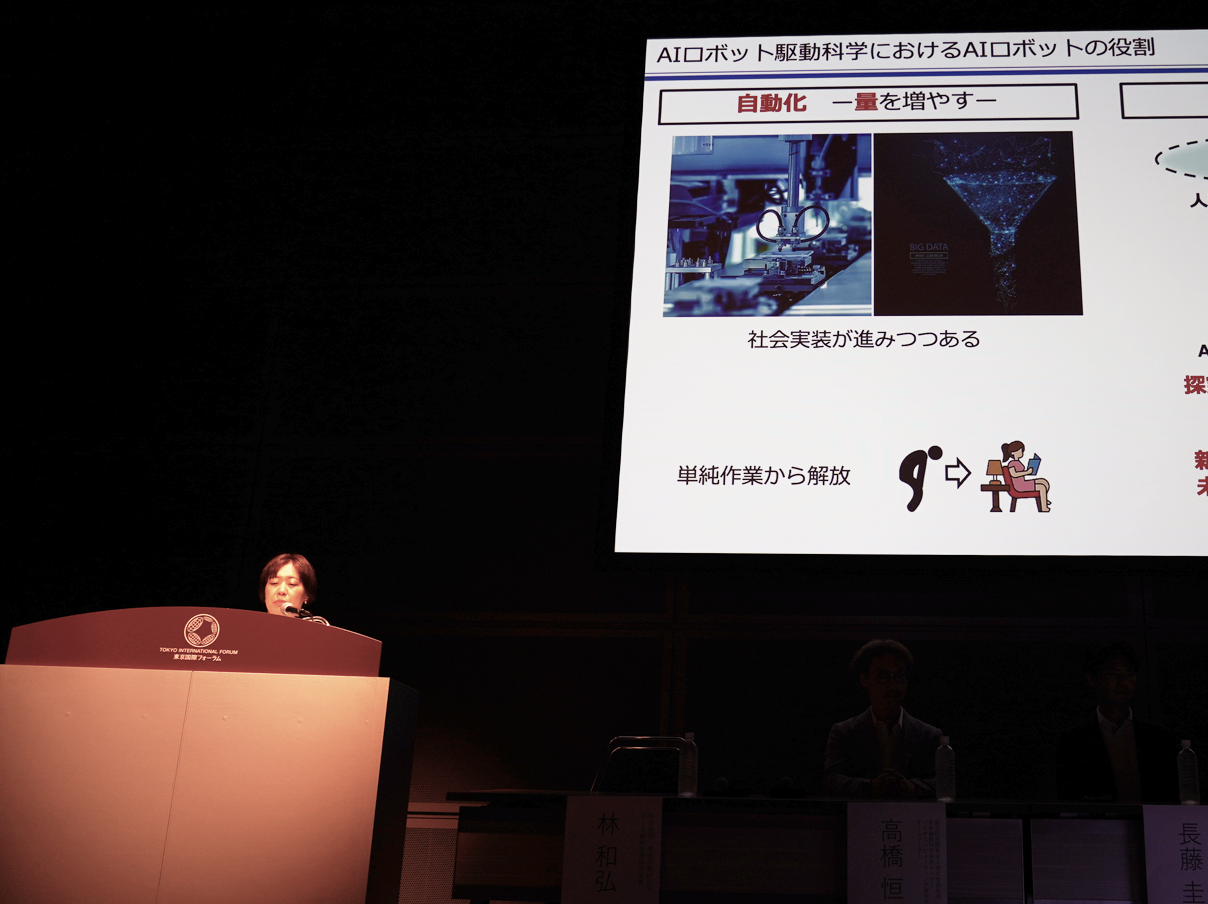
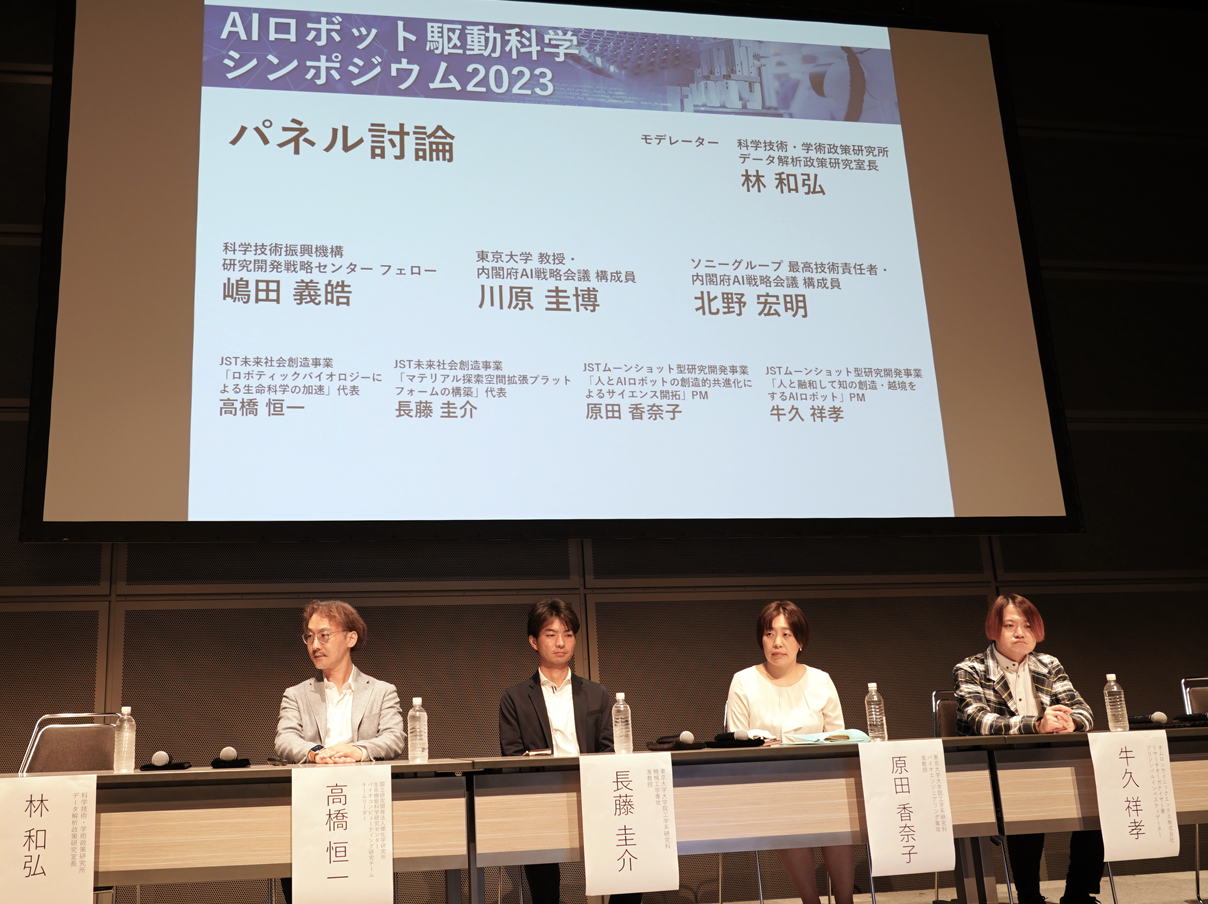
東京国際フォーラムにて開催された「AIロボット駆動科学シンポジウム」のレポートが公開されました 2023年10月23日 最終更新日時 : 2024年2月7日 miyahara 2023年7月6日に、申込多数につき増枠して開催された「AIロボット駆動科学シンポジウム 2023」の開催レポートが、この度公開されました。 AIロボット駆動科学シンポジウム 2023 公式サイト 詳細な開催報告書がご覧いただけます。 「MEEP」からは、シンポジウムオーガナイザーでもある長藤圭介氏と牛久祥孝氏がプロジェクトの最新トピックスや動向を紹介し、外部の識者を交えてのパネルディスカッションに参加しました。また、一杉グループの清水亮太氏が「AIロボット駆動科学が向かうべき方向性とその実践、そして社会との対話」と題して、各領域の研究者の一人として講演を行いました。 MEEPからの登壇者 ■講演(第一部):AIロボット駆動科学分野のイニシアティブに向けて 暗黙知を形式知にしてAIやロボットを活用 長藤 圭介 氏 JST未来社会創造事業「マテリアル探索空間拡張プラットフォームの構築」代表 東京大学大学院工学系研究科 准教授 実験科学を自ら進められるAIロボットを 牛久 祥孝 氏 JSTムーンショット型研究開発事業 「人と融和して知の創造・越境をするAIロボット」PM オムロンサイニックエックス株式会社リサーチアドミニストレイティブディビジョンリサーチオーガナイザー兼プリンシパルインベスティゲーター ■講演(第二部):AIロボット駆動科学が向かうべき方向性と実践、そして社会との対話 マテリアルインフォマティクス・プロセスインフォマティクスのためのAI駆動科学 清水 亮太 氏 東京大学 長藤圭介氏は、日本の技術開発が世界と競合するには、暗黙知に頼り過ぎ形式知へのシフトが進まず、AIやロボットの活用が遅れていることが課題であると指摘しました。この形式知へのスパイラスアップの重要性は、来賓挨拶でトヨタ自動車 元代表取締役社長 渡辺捷昭氏からも科学技術を進化させる大きな手法となるという指摘がありました。また長藤氏は新しい研究手法として、人間がデータを見て、仮説を立て、またデータ駆動する「ハイブリッド型研究」のOODA(Observe、Orient、Decide、Act)ループで進めるべきだと指摘しました。材料科学分野の具体的な取り組みとして、半導体プロセスを用いた無機材料の自律探索の成功例を示し、人を介さずAIがプランニングして固体電池の材料開発を進めていることを紹介しました。最後に「MEEP」では総勢50人規模で取り組んでいるもののまだまだ足りない現状を説明し、国のバックアップに加えて、今回の参加者にも賛同と協力を訴えました。 牛久祥孝氏は、人間の研究者とAIロボットが相互協力して2050年までにノーベル賞を受賞するAIを作ることを目標としており、目標からバックキャストすると2030年までにはAIロボットが自律的に研究ループを回し、2025年までに科学実験の学習能力を持つことと示しました。また、昨今、注目を集めているLLMについて説明し、基盤モデルを作れば様々なタスクに適用できるが、AIロボットが物理現象も含めて正しく理解し、研究者とインタラクションして共進化する基盤モデルが必要なことを指摘しました。同様の指摘は高橋恒一氏からもあり、学問分野を統合した「One Science」の実現を目指すとの発表がありました。 パネルディスカッションでは、1)知識生産労働集約作業からの解放、2)知識創造の労働集約作業からの解放、3)新しい知識共有メディアとコミュニティの可能性、について議論されました。最後に長藤氏は、横断型の議論を通して使い手と作り手が融合することの重要性を訴え、牛久氏は科学基盤モデルを作る仲間を募集し科学者の集結を求めました。 一杉グループの清水亮太氏は、「マテリアルインフォマティクス・プロセスインフォマティクスのためのAI駆動科学」というテーマで講演しました。清水氏は自律的物質探索の手法で、実験サイクルを人間の介在なしにロボットとAIが自律的に繰り返す仕組みを2020年に発表しました。無機材料研究の分野ではこの2020年が大きな転換点で、海外においても、ヨーロッパ、アメリカ、カナダ、中国が力を入れて進めており、日本における動きとして、清水氏の東京工業大学 物質理工学院応用科学系の研究室における成果を紹介しました。 AIロボット駆動科学の可能性や目標、課題等を多角的・多面的に共有することができ、ファーストアクションとして大変意義深いものとなりました。